近日,安徽农业大学工学院朱林教授课题组针对茶园种植地形不规则、主旋翼下洗风场旋转产生的桨尖涡及尾迹流动程度加剧,导致无人机植保喷施飘移程度严重的现状,研究了面向皖南茶园的无人机植保喷施飘移控制关键技术。相关研究成果以“Most Appropriate Nozzle of Six-Rotor UAV for Prescribed Spraying Liquid in Tea Plantation under Effects of Downwash Flow Structure in Hover”为题在农业工程领域知名学术期刊《Crop Protection》上发表。
近年来,利用植保无人机进行航空施药防治病虫害的方法,在水稻、玉米、小麦等主要粮食作物的生产中越来越广。但是,由于受到茶园种植地形不规则(多分布在台地和山地),飞行气流扰动大等综合因素的影响,无人机主旋翼旋转产生的桨尖涡和尾迹流动局烈,导致无人机喷施药液发生飘移的程度相比水稻、玉米、小麦等主要粮食作物更为严重。
图1 六旋翼无人机茶园喷施示意图
针对上述问题,朱林教授课题组和茶树生物学与资源利用国家重点实验室侯如燕教授团队合作,采用k-ω气相湍流耦合Lagrangian离散相流体动力学数值计算和试验测试相结合的方法,以无人喷施飘移控制为目标,研究了融合复杂地形与旋翼扰动影响下,喷嘴选型与喷施农药的优化匹配关系。
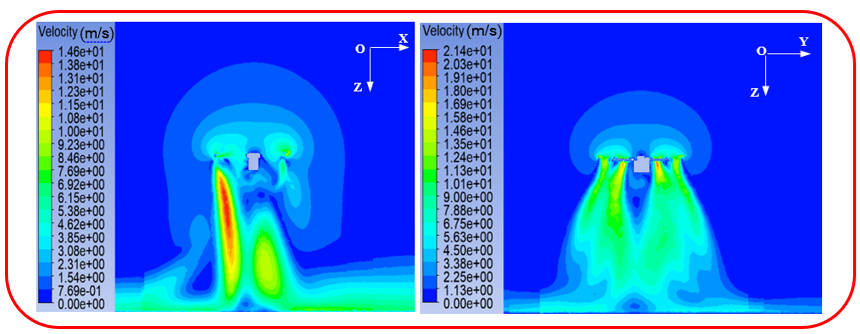
图2 六旋翼无人机悬停下洗风场波动示意图
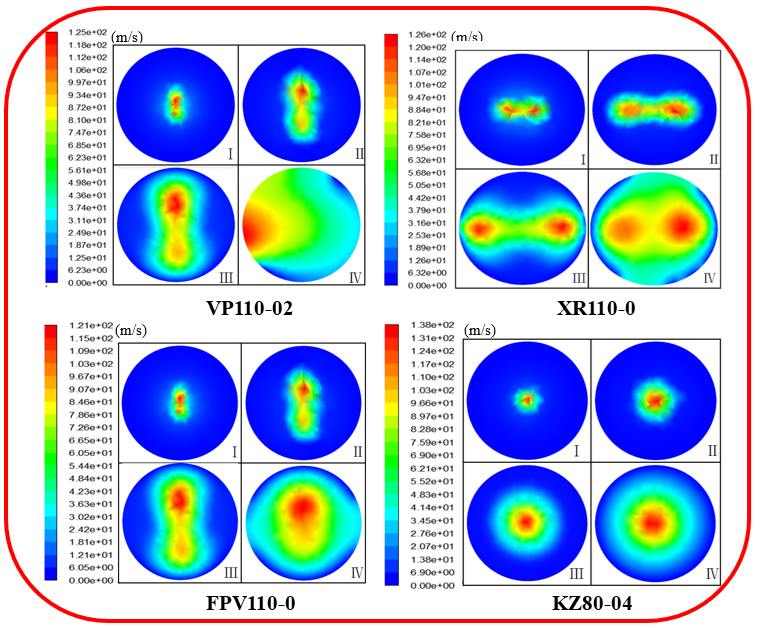
图3 不同喷嘴药液喷施幅度及速度变化示意图
论文第一作者是工学院硕士生周文轩,通讯作者是朱林教授。此研究得到茶树生物学与资源利用国家重点实验室开放基金、安徽省重点研发计划及安徽省自然科学重大科研等项目的支持。
论文链接:https://doi.org/10.1016/j.cropro.2024.106819

